Tender-Grade Quality
Auto Robot Trainer
Export Worldwide
Full Documentation
Made in India
- Response within 1 business day
- Global logistics
- Tender-ready docs
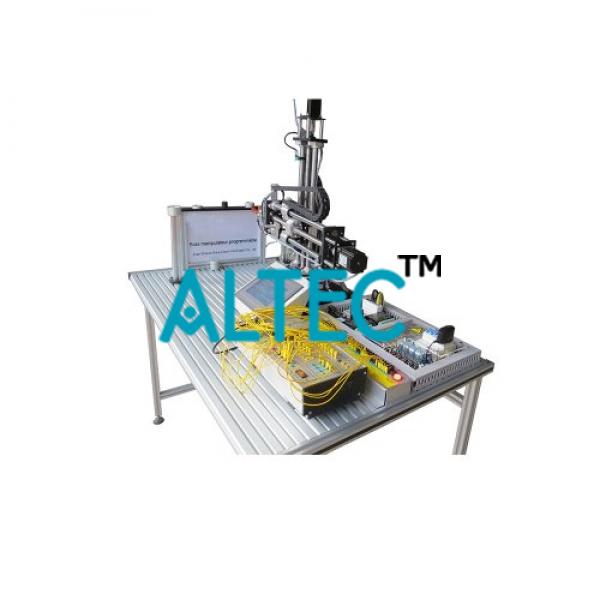
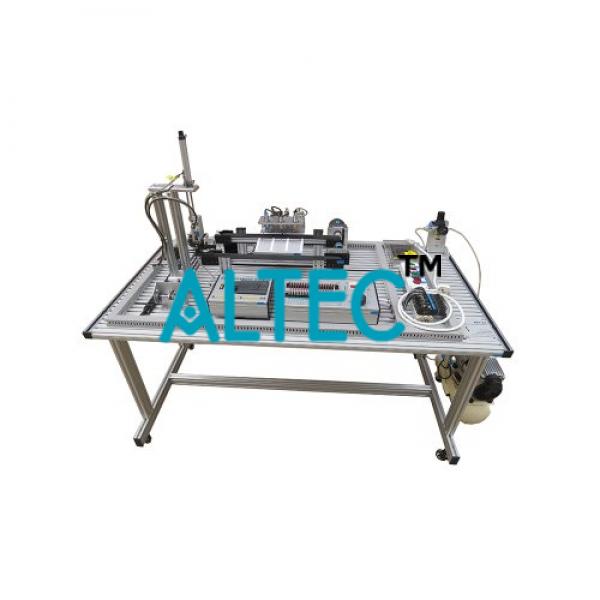
Auto Robot Trainer
it include 4 DOF: two rotary joint, axis in in parallel, to realize In-plane positioning and orientation, one move joint, to realize terminal lift movement. The detailed mechanical system include 3 parts: base, arm, end effector. Each part has DOF, it construct a multi DOF mechanical system. Base include swing mechanism(shoulder joint), Arm include large arm and forearm, end effector(hand)is a compact hand structure. This robot has high rigidity, high precision, high speed, small space to install, design is free, it can be assembly as welding robot, X-Y robot, optical detection robot, pick up and put down robot, plugin robot etc. Finish assembly, welding, sealing, handling, pick up, put down action, it include control system. Arm1, arm2, arm 3,base height 200*200*250*250mm.
Possible to control the input/output of parts
Various joints to move forward and backward , up and down, left and right .
Possible to control the input/output of parts
Various joints to move forward and backward , up and down, left and right .
To request a quotation for Auto Robot Trainer (Product Code MCHT0036), share your tender BoQ or requirement list by:
- Email: sales@equipmentsexporters.com
- Phone: +91 9311469084
- WhatsApp: +91 9311469084
Quotation turnaround is typically 24-48 hours with brochures, datasheets and a priced compliance statement.